碰撞检测 | 详解矩形AABB与OBB碰撞检测算法(附ROS C++可视化)
目录
- 0 专栏介绍
- 1 AABB碰撞检测
- 2 OBB碰撞检测
- 3 算法仿真与可视化
0 专栏介绍
🔥课设、毕设、创新竞赛必备!🔥本专栏涉及更高阶的运动规划算法轨迹优化实战,包括:曲线生成、碰撞检测、安全走廊、优化建模(QP、SQP、NMPC、iLQR等)、轨迹优化(梯度法、曲线法等),每个算法都包含代码实现加深理解
🚀详情:运动规划实战进阶:轨迹优化篇
矩形包围盒碰撞检测的核心原理是用矩形近似待检测物体轮廓,通过计算两个矩形间是否有重叠区域来进行碰撞判断。常用的包围形式有轴对齐包围盒(Axis-Aligned Bounding Box, AABB)以及更精细化具有角度的方向包围盒(Oriented Bounding Box)

本文的最终效果如下所示

1 AABB碰撞检测
如图所示为AABB碰撞检测的原理,其通过计算两个矩形在对齐的若干条轴上的投影来判碰,当且仅当所有轴的投影都发生重叠时两个AABB产生碰撞。

算法原理如表所示,其中矩形用左上角坐标和长宽来表示

按照算法流程实现核心算法
bool VRectangle::_AABBCollisionDetection(const std::shared_ptr<VRectangle>& other)
{
return lt_pt_.x < other->left_top_point().x + std::fabs(other->length()) &&
other->left_top_point().x < lt_pt_.x + std::fabs(l_) &&
lt_pt_.y < other->left_top_point().y + std::fabs(other->width()) &&
other->left_top_point().y < lt_pt_.y + std::fabs(w_);
}
2 OBB碰撞检测
OBB碰撞检测的核心原理是应用分离轴定理,在矩形的长宽两个方向进行投影(共计4次),判断投影是否重叠;只要存在一条投影轴不发生重叠,表明找到了至少一条分离轴,即两个OBB不发生碰撞
沿矩形长宽方向设置方向向量以及待投影的几何向量
{ k 1 = [ cos α sin α ] T k 2 = [ sin α − cos α ] T k 3 = [ cos β sin β ] T k 4 = [ sin β − cos β ] T , { v 1 = l 1 − k 1 v 2 = w 1 − k 2 v 3 = l 2 − k 3 v 4 = w 2 − k 4 \begin{cases} \boldsymbol{k}_1=\left[ \begin{matrix} \cos \alpha& \sin \alpha\\\end{matrix} \right] ^T\\ \boldsymbol{k}_2=\left[ \begin{matrix} \sin \alpha& -\cos \alpha\\\end{matrix} \right] ^T\\ \boldsymbol{k}_3=\left[ \begin{matrix} \cos \beta& \sin \beta\\\end{matrix} \right] ^T\\ \boldsymbol{k}_4=\left[ \begin{matrix} \sin \beta& -\cos \beta\\\end{matrix} \right] ^T\\\end{cases}, \begin{cases} \boldsymbol{v}_1=l_{1}^{-}\boldsymbol{k}_1\\ \boldsymbol{v}_2=w_{1}^{-}\boldsymbol{k}_2\\ \boldsymbol{v}_3=l_{2}^{-}\boldsymbol{k}_3\\ \boldsymbol{v}_4=w_{2}^{-}\boldsymbol{k}_4\\\end{cases} ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧k1=[cosαsinα]Tk2=[sinα−cosα]Tk3=[cosβsinβ]Tk4=[sinβ−cosβ]T,⎩⎪⎪⎪⎨⎪⎪⎪⎧v1=l1−k1v2=w1−k2v3=l2−k3v4=w2−k4
其中 l i − l_{i}^{-} li−、 w i − w_{i}^{-} wi−分别是矩形长、宽的一半
设置向量 d \boldsymbol{d} d连接两个矩形的中心,用于判断两个矩形的投影是否发生重叠,具体判据是
d < ( r 1 − + r 2 − ) d<\left( r_{1}^{-}+r_{2}^{-} \right) d<(r1−+r2−)
其中 d d d是向量 d \boldsymbol{d} d在给定投影轴的投影长度; r i − r_{i}^{-} ri−是矩形 i i i在给定投影轴的投影长度的一半

举个例子,对于下图所示的投影,计算
{ d = ∣ d T k 1 ∣ r 1 − = ∣ v 1 T k 1 ∣ r 2 − = ∣ v 3 T k 1 ∣ + ∣ v 4 T k 1 ∣ \begin{cases} d=\left| \boldsymbol{d}^T\boldsymbol{k}_1 \right|\\ r_{1}^{-}=\left| \boldsymbol{v}_{1}^{T}\boldsymbol{k}_1 \right|\\ r_{2}^{-}=\left| \boldsymbol{v}_{3}^{T}\boldsymbol{k}_1 \right|+\left| \boldsymbol{v}_{4}^{T}\boldsymbol{k}_1 \right|\\\end{cases} ⎩⎪⎪⎨⎪⎪⎧d=∣∣∣dTk1∣∣∣r1−=∣∣v1Tk1∣∣r2−=∣∣v3Tk1∣∣+∣∣v4Tk1∣∣
再进行对比即可

遍历矩形的四条边即可得到算法流程
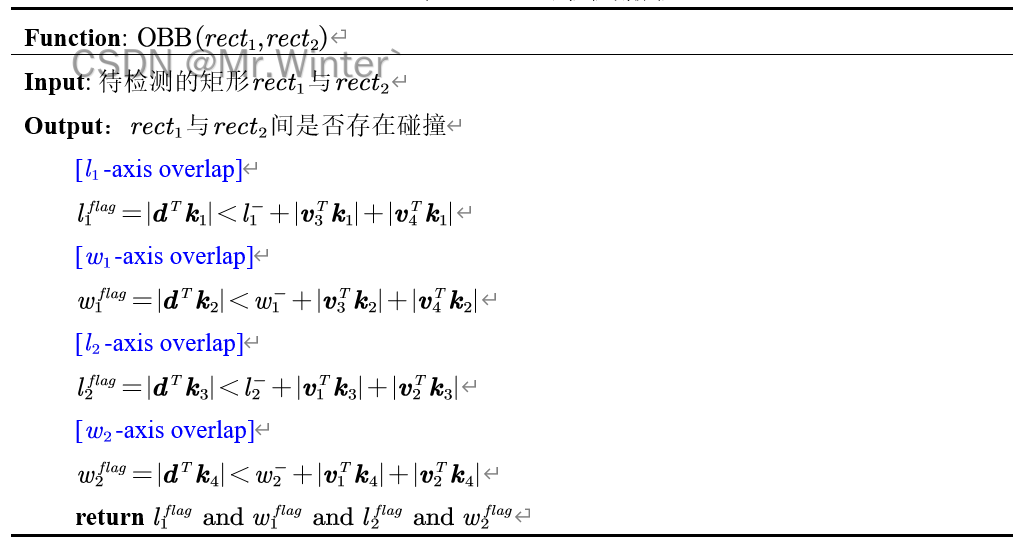
核心代码如下所示
bool VRectangle::_OBBCollisionDetection(const std::shared_ptr<VRectangle>& other)
{
const float shift_x = other->center().x - center_.x;
const float shift_y = other->center().y - center_.y;
const float half_length = 0.5f * std::fabs(l_);
const float half_width = 0.5f * std::fabs(w_);
const float other_half_length = 0.5f * std::fabs(other->length());
const float other_half_width = 0.5f * std::fabs(other->width());
const float dx1 = cos_angle_ * half_length;
const float dy1 = sin_angle_ * half_length;
const float dx2 = sin_angle_ * half_width;
const float dy2 = -cos_angle_ * half_width;
const float dx3 = other->cos_angle() * other_half_length;
const float dy3 = other->sin_angle() * other_half_length;
const float dx4 = other->sin_angle() * other_half_width;
const float dy4 = -other->cos_angle() * other_half_width;
return std::abs(shift_x * cos_angle_ + shift_y * sin_angle_) <= std::abs(dx3 * cos_angle_ + dy3 * sin_angle_) +
std::abs(dx4 * cos_angle_ + dy4 * sin_angle_) +
half_length &&
std::abs(shift_x * sin_angle_ - shift_y * cos_angle_) <= std::abs(dx3 * sin_angle_ - dy3 * cos_angle_) +
std::abs(dx4 * sin_angle_ - dy4 * cos_angle_) +
half_width &&
std::abs(shift_x * other->cos_angle() + shift_y * other->sin_angle()) <=
std::abs(dx1 * other->cos_angle() + dy1 * other->sin_angle()) +
std::abs(dx2 * other->cos_angle() + dy2 * other->sin_angle()) + other_half_length &&
std::abs(shift_x * other->sin_angle() - shift_y * other->cos_angle()) <=
std::abs(dx1 * other->sin_angle() - dy1 * other->cos_angle()) +
std::abs(dx2 * other->sin_angle() - dy2 * other->cos_angle()) + other_half_width;
}
3 算法仿真与可视化
通过Rviz->Add New Tool添加Polygon Simulation插件

开启碰撞检测功能后,验证AABB和OBB碰撞检测算法
- AABB无碰撞情形

- AABB有碰撞情形

- OBB无碰撞情形

- OBB有碰撞情形

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏: